University of Toronto |Faculty of Applied Science and Engineering |webmaster
All contents copyright © Autonomous Systems and Biomechatronics Lab.
Assistive Devices
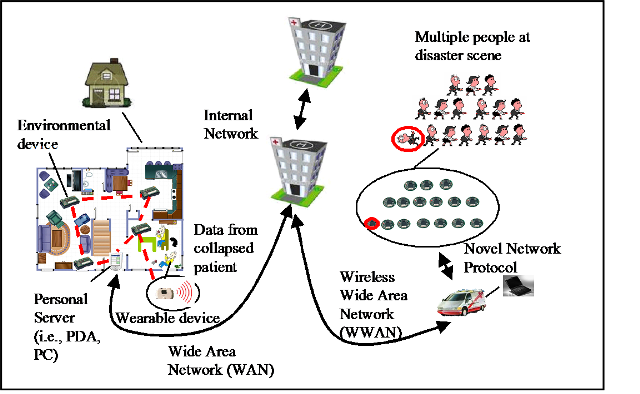
The objective of our research work is to develop multi-modal sensory systems that are integrated in heterogeneous health monitoring devices. The devices will be wearable on the patient and some will be placed inside the environment in which the patient occupies. Together these devices can provide effective remote health monitoring of a person and also inform the person of important information.
Funding Sources: The Natural Sciences and Engineering Research Council of Canada (NSERC) and The New York State Center of Excellence in Wireless and Information Technology (CEWIT)
Lower-body Exoskeleton Devices
We also focus on the development of control schemes for wearable lower-body exoskeleton devices, for use in post-stroke gait rehabilitation. Persons post-stroke often experience reduced motor control which can affect their overall gait pattern. Improving motor performance and function via robotic exoskeletons is a key goal of our post-stroke rehabilitation research.
To validate gait patterns and control schemes to be used in exoskeleton control, simulations prior to hardware implementation are vital for ensuring patient safety and comfort. Our research has so far focused on the development of novel centralized software architectures that allow for both the simulation and control of exoskeletons, in order to allow for the ease in prototyping, validation and testing of gait patterns.
This ultimately allows for a desired gait pattern to be controlled, adjusted, and directly verified by physiotherapists on-the-fly during gait rehabilitation sessions, both in simulation and on a real exoskeleton. We are also currently investigating the use of machine learning techniques for learning patient-specific exoskeleton control schemes.
Video:
Video 2:
https://vimeo.com/showcase/7661752/video/467177802
Published in:
L. Rose, M. C. F. Bazzocchi, C. de Souza, J. Vaughan-Graham, K. Patterson, G. Nejat, "A Framework for Mapping and Controlling Exoskeleton Gait Patterns in Both Simulation and Real-World," Design of Medical Devices Conference, DMD2020-9009, 2020. (PDF)
L. Rose, M. C. F. Bazzocchi, and G. Nejat, “End-to-End Deep Reinforcement Learning for Exoskeleton Control,” IEEE Conference on Systems, Man and Cybernetics, October 14, 2020.
Funding Sources: The Natural Sciences and Engineering Research Council of Canada (NSERC), The University of Toronto EMHSeed Fund, and the Canada Research Chairs Program.