University of Toronto |Faculty of Applied Science and Engineering |webmaster
All contents copyright © Autonomous Systems and Biomechatronics Lab.
Intelligent Perception
The Intelligent perception research area is related to the investigation of complex objects and operational processes by means of multi-sensorial data provided by sensors which differ in spatial, temporal, and spectral resolutions and in the output sensory format. During perception, hypotheses are formed and tested about percepts that are based on three criteria: sensory data, knowledge, and high-level cognitive processes.
One of our main research objectives in this area is to develop and utilize robust techniques to address the sensory requirements with respect to autonomous high-speed meso/micro milling applications. The research work focuses on the development of the task-space and joint-space sensors for a 5-axis high precision meso-milling machine including an innovative 3D workpiece profilometer, and a novel 3-component cutting force sensor.
Project: Design of a Sensory System for the 3D Reconstruction of Complex and Small Objects
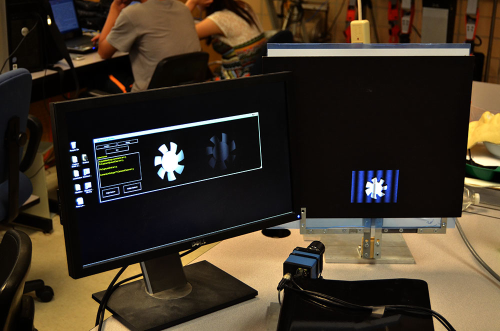
Vision sensor data is a key element for intelligent perception. Computer vision systems provide sensory information of the environment based on 2D and 3D images. Applications of vision systems range widely from industrial machine systems, artificial intelligence, and autonomous robots that comprehend and maneuver through terrain. In this context, structured light is a well-known technique that projects a light pattern onto an object/scene and obtains the depth information from the deformation of the original pattern due to the object’s shape or the various objects in an environment. Structured Light Systems have led to a growing number of applications in diverse fields: 3D intra-oral dental measurements, human body shape measurement for shape guided radiotherapy treatment, characterization of MEMS components, surface profile of a machining workpiece, 3D face reconstruction for face recognition, among others.
In manufacturing applications, 3D shape reconstruction of complex manufactured parts using optical-based 3D sensing has become very attractive to overcome the high cost and low speed of the traditional mechanical approaches, for example using Coordinate Measuring Machines (CMM). Hence, our group aims to develop a novel optical real-time sensory system, in both hardware and software, capable of providing 3D surface reconstruction of objects with complex shapes and wide range of materials using structured-light technique.
Video
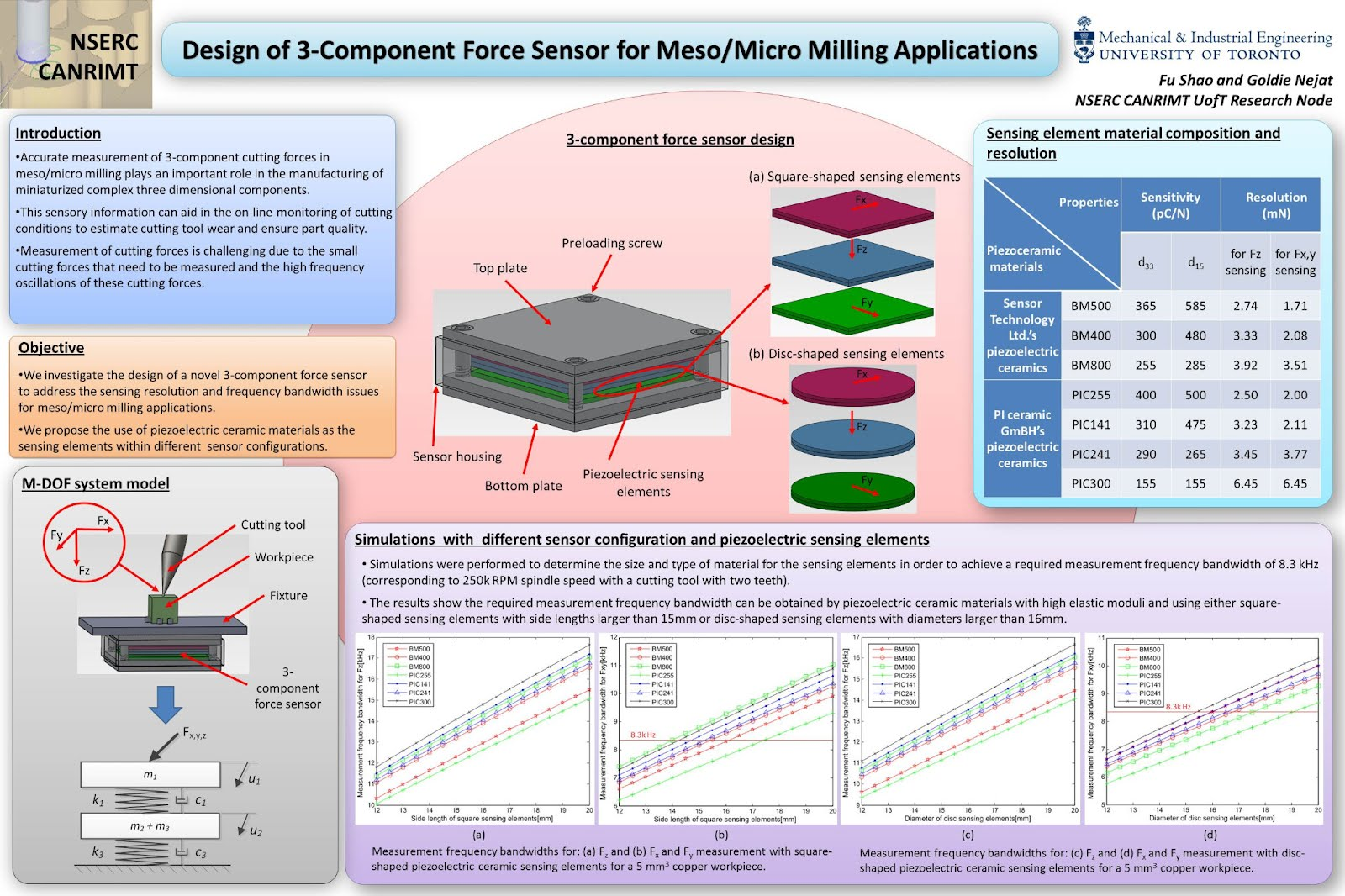
Project: Design of a 3-component force sensor for meso/micro milling applications
Accurate measurement of 3-component cutting forces is imperative for the manufacturing of miniaturized complex 3D components that are in high demand for a wide variety of industries including aerospace, automotive, biomedical, communications, electronics, environmental, and optics. However, this task is challenging due to the small cutting forces that need to be measured and the high frequency oscillations of these cutting forces. The objective of this research work is to develop a novel 3-component piezoelectric force sensor to address the sensing resolution and frequency bandwidth issues that currently exist in the measurement of cutting forces in high-speed meso milling applications. The novelty of the sensor design is in the investigation into the use of piezoelectric ceramic materials as the sensing elements within different configurations to achieve the required sensing resolution and measurement frequency bandwidth for the 3-component force sensor.
Funding Sources: This research is funded by the Natural Science and Engineering Research Council of Canada through the Canadian Network for Research and Innovation in Machining Technology (NSERC CANRIMT).